MechGL 2024 - Aufgabenstellung Versuch 2
Inhalt: Vergleich der Fahrzeuggeschwindigkeit und Ermittlung der Rekuperationsverzögerung
Contents
Beschreibung des Versuchs
Ein Mercedes EQE fährt drei vollständige Runden mit einem Durchmesser von ca. 40 m auf dem prüffeld der HTW Dresden. Der Start- und Endpunkt liegt dabei immer zwischen zwei Lichtschranken. Die Geschwindigkeit wird über einen Tempomaten geregelt und beträgt 25..35 km/h. Nach der zweiten Runde erfolgt eine Verzögerung in unterschiedlichen Modi. Durch die Messung mit den Lichtschranken ist eine unabhängige Vergleichsmöglichkeit zur Überprüfung der GPS-Geschwindigkeit vorhanden. Hierzu ist der Zeitpunkt der Durchquerung der Lichtschranken zu ermitteln.
Beschreibung der Messdaten
Zur Auswertung stehen die Daten eines GPS-Empfängers und die aus zwei Lidar-Messungen ermittelten Abstände zur Verfügung.
GPS-Empfänger:
- t_GPS - Zeit in s
- speed - Geschwindigkeit in m/s
- lla(:,1) - Breitengrad in ° (latitude)
- lla(:,2) - Längengrad in ° (longitude)
Lichtschranke:
- t_ls - Zeitstempel für beide Lichtschranken (in s)
- ls_01 - Werte Lichtschranke 1 (0 - frei / 1 - belegt)
- ls_02 - Werte Lichtschranke 1 (0 - frei / 1 - belegt)
Fahrdynamiksensor (MM3):
- t_MM3_yr - Zeit in s für Gierrate (yawrate_MM3)
- yawrate_MM3 - Gierrate in °/s
Die Auswertung der Messungen der Lichtschranken ist aus der nachfolgenden Grafik ersichtlich:
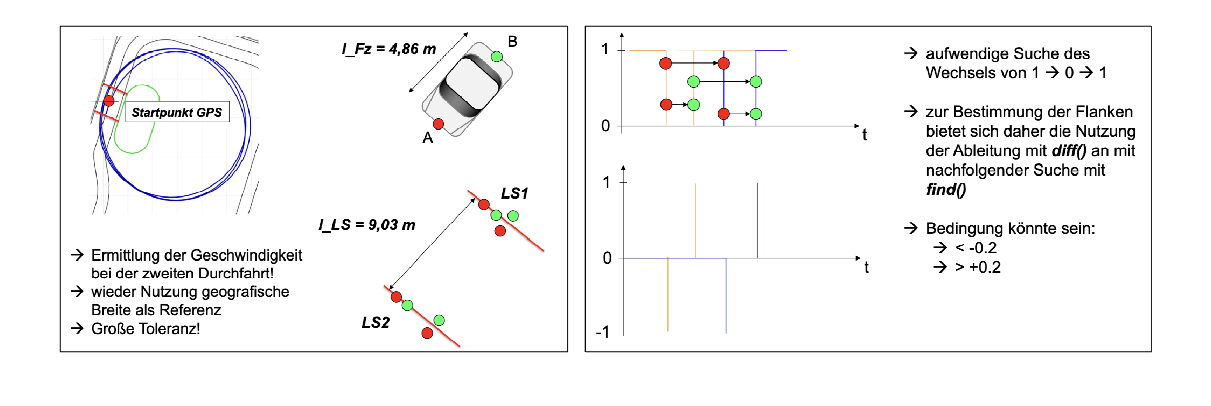
Bild 1: Auswertung der Lichtschrankenmessungen
Rahmenprogramm
Zur automatisierten Ausführung wurde ein Rahmenprogramm mit mehreren Skripten und den Messdaten als .zip-Datei bereitgestellt. Die nach dem entpacken erzeugte Verzeichnisstruktur ist beizubehalten. Lediglich die Platzhalter "xxxxx" sind sowohl beim Verzeichnisnamen als auch dem Rahmenprogramm durch ihre Matrikelnummer zu ersetzen. In der Hauptschleife erfolgen der Aufruf und das Einlesen aller im Verzeichnis Data abgelegten Messungen. Bitte beachten sie, dass der Schleifenzähler i in den anderen Skripten innerhalb der Schleife NICHT mehr verwendet werden darf.
clearvars; clc; close all; vzn = dir('Data/Messung*'); anz_f = length(vzn); for i = 1:1:3 %anz_f MechGL_Versuch_02_DATA; % bereitgestelltes Skript zum Einlesen der Daten MechGL_Versuch_02_Berechnung_01; % eigenes Skript zu Auswertung INNERHALB der Hauptschleife end MechGL_Versuch_02_Berechnung_02; % zusätzliches Skript zu Auswertung NACH der Hauptschleife (falls notwendig)
Das Rahmenprogramm ist dabei so aufgebaut, dass hier auch eine automatische Dokumentation im .html-Format mit der Funktion publish() erfolgen kann. Bitte beachten sie hier die in der Vorlesung/Übung erläuterte Vorgehensweise. Weitere Hinweise finden sie auf den Hilfeseiten zur Funktion:
https://de.mathworks.com/help/matlab/ref/publish.html
https://de.mathworks.com/help/matlab/matlab_prog/marking-up-matlab-comments-for-publishing.html
Aufgaben
Ermittlung folgender Daten aus den teilaufbereiteten Daten:
1. Fahrgeschwindigkeit GPS an der Lichtschranke - v_pass_F(1:anz_f)
2. Fahrgeschwindigkeiten Lichtschranke - v_pass_L(1:anz_f,1:4)
Für den Punkt 1 kann die Gierrate des Fahrdynamiksensors verwendet werden. Die Vorgehensweise wurde in der Vorlesung beschrieben. Aus dem Sensorwert ist der Gierwinkel durch numerische Intergration zu berechnen. Der Zeitpunkt für die Durchquerung der Lichtschranken liegt dann bei 720°. Mit diesem Zeitpunkt kann in den GPS-Zeitstempeln nach dem zugehörigen Index der GPS-Zeit gesucht werden. Die Geschwindigkeit ist mit dem entsprechenden Index aus den Geschwindigkeitswerten ermittelbar. Eine Alternative Ermittlung ist über die GPS-Position möglich. Hierzu ist ein Suchbereich um den jeweiligen Startpunkt festzulegen. Es reicht aus, den Breitengrad des jeweiligen Startwertes als obere Grenze zu nutzen und für die untere Grenze hiervon einen Offset von lat_off = 0.00003 abzuziehen. Dabei muss zusätzlich noch eine Begrenzung des Längengrades erfolgen sowie eine Mindestgeschwindigkeit (z.B. 15 km/h). Von den mit der Funktion find() ermittelten Indizes ist dann der letzte Index der gesuchte Wert. Für die erste Messfahrt ist das Ergebnis der Detektion in der nachfolgenden Grafik dargestellt.
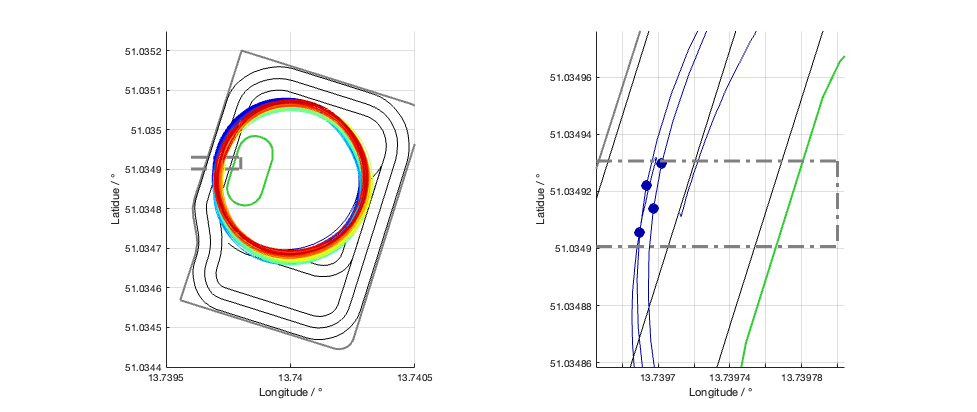
Bild 2: GPS-Koordinaten aller Messungen (links) und der ersten Messung mit den eingezeichneten relevanten GPS-Punkten (rechts)
Die Ermittlung der Zeitpunkte der Auslösung der Lichtschranken erfolgt durch die Suche nach den jeweiligen Flanken im Signal. Hierzu kann die in der Vorlesung erläuterte Differenzbildung zur Bestimmung der Indizes genutzt werden. Dabei ist für Lichtschranke 1 der zweite Impuls relevant, für Lichtschranke 2 hingegen der dritte. Die nachfolgende Grafik zeigt die Auswertung für eine Messung.
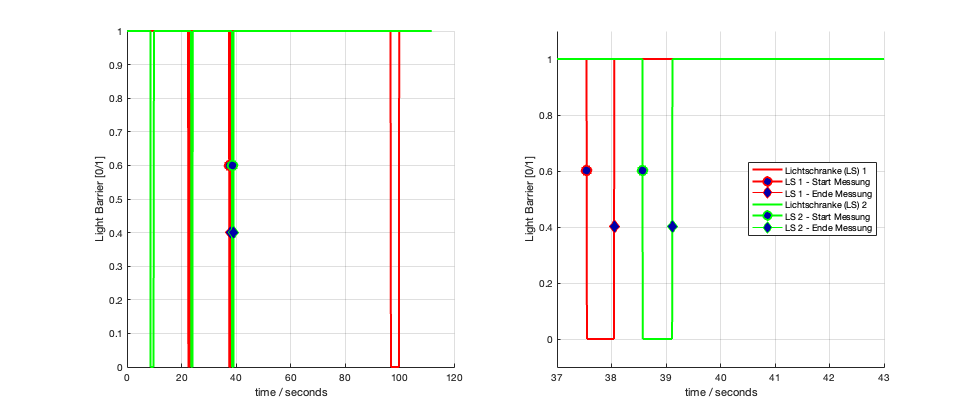
Bild 3: Beispielmessung der Lichtschrankenauslösung.
Beachten sie bitte, dass es auf Grund eines Positionierfehlers bei Messung Nr. 16 zu einer anderen Reihenfolge kam. Bei dieser Fahrt ist auch bei Lichtschranke 2 der zweite Impuls bei absteigender Flanke zu verwenden. Der folgende Programmcode wurde zur Erstellung der Aufgabenstellung für die absteigende Flanke genutzt. Die Ermittlung der Rekuperationsverzögerung
pos1 = find(diff(ls_01) < -0.2); pos2 = find(diff(ls_02) < -0.2); idx1 = pos1(2); if i == 16 idx2 = pos2(2); else idx2 = pos2(3); end dt_LB(i) = t_ls(idx2) - t_ls(idx1);
Beschreibung und Darstellung der Ergebnisse
In der Auswertung muss eine kurze Beschreibung des Versuchsablaufs sowie der Vorgehensweise enthalten sein. Die Einbindung externer Quellen (Internet) ist hierbei ausdrücklich erwünscht. Aus den Messungen der Lichtschranken sind die möglichen 4 Messwerte zu in einer gemeinsamen Grafik mit der ermittelten GPS-Geschwindigkeit darzustellen. Auf ungewöhnliche Abweichungen sollte dabei kurz eingegangen werden.
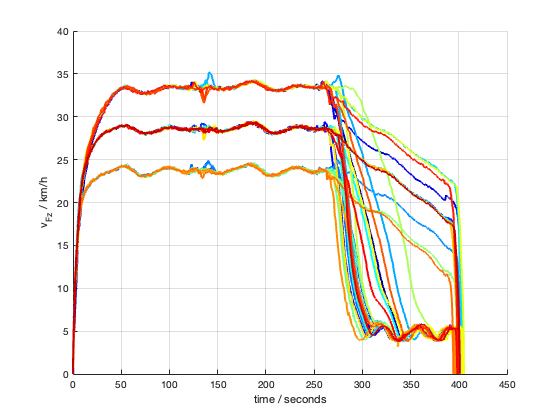
Bild 4: Darstellung der GPS-Geschwindigkeiten aller Messfahrten.
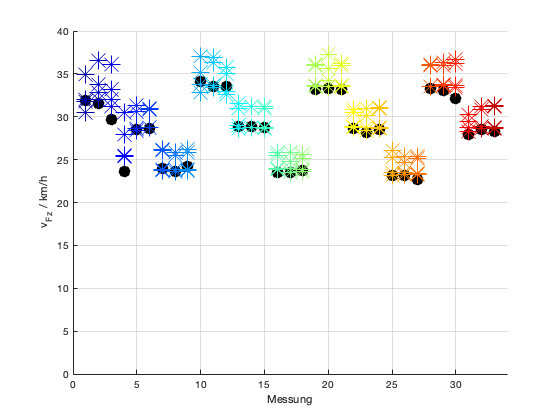
Bild 5: Vergleich der Geschwindigkeiten. Die Messungen der Lichtschranken sind mit einem '*' markiert, die des GPS-Empfängers mit einem 'o'.