MechGL 2024 - Aufgabenstellung Versuch 1
Inhalt: Auswertung assistiertes Einparken
Contents
Beschreibung des Versuchs
Ein Passat GTE führt unter verschiedenen Randbedingungen ein assistiertes Einparkmanöver in eine Querparklücke durch. Die Geschwindigkeit wird dabei sowohl über den Fahrzeug-CAN als auch über ein zusätzliches GPS-Modul erfasst. In den Versuchen wurden die folgenden Parameter variiert:
- Geschwindigkeit der Vorbeifahrt
- Abstand bei der Vorbeifahrt
- Breite der Parklücke
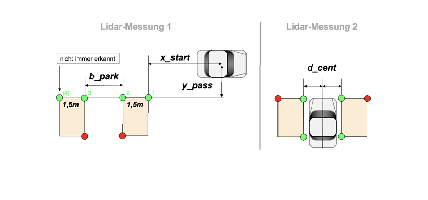
Je nach Rahmenbedingung mussten mehrere Züge zur Erreichung der finalen Parkposition erfolgen. Sowohl in der Position vor Start des Einparkmanövers als auch nach dessen Ende erfolgte eine Messung mit einem Lidar zur Ermittlung der folgenden Werte:
- Abstand bei der Vorbeifahrt (Lidarmessung 1)
- Ausrichtung in der Parklücke (Lidarmessung 2)
Im folgenden Video ist eine Versuchsdurchführung als Beispiel zu sehen: https://youtu.be/pNRMVZeC0MA
Beschreibung der Messdaten
Zur Auswertung stehen die Daten eines GPS-Empfängers und die aus zwei Lidar-Messungen ermittelten Abstände zur Verfügung.
GPS-Empfänger:
- t_GPS - Zeit in s
- speed - Geschwindigkeit in m/s
- lla(:,1) - Breitengrad in ° (latitude)
- lla(:,2) - Längengrad in ° (longitude)
- lat_ref - Referenzwert Breite in °
- lon_ref - Referenzwert Länge in °
Lidar:
- pkt_01_x - x-Abstand Markierungen in m (3..4 Punkte)
- pkt_01_y - y-Abstand Markierungen in m (3..4 Punkte)
- pkt_02_x - x-Abstand Markierungen in m (4 Punkte)
- pkt_02_y - y-Abstand Markierungen in m (4 Punkte)
Die Anordnung der berechnten Punkte ist aus der nachfolgenden Grafik ersichtlich:
Rahmenprogramm
Zur automatisierten Ausführung wurde ein Rahmenprogramm mit mehreren Skripten und den Messdaten als .zip-Datei bereitgestellt. Die nach dem entpacken erzeugte Verzeichnisstruktur ist beizubehalten. Lediglich die Platzhalter "xxxxx" sind sowohl beim Verzeichnisnamen als auch dem Rahmenprogramm durch ihre Matrikelnummer zu ersetzen. In der Hauptschleife erfolgen der Aufruf und das Einlesen aller im Verzeichnis Data abgelegten Messungen. Bitte beachten sie, dass der Schleifenzähler i in den anderen Skripten innerhalb der Schleife NICHT mehr verwendet werden darf.
clearvars; clc; close all; vzn = dir('Data/Messung*'); anz_f = length(vzn); for i = 1:1:3 %anz_f MechGL_Versuch_01_DATA; % bereitgestelltes Skript zum Einlesen der Daten MechGL_Versuch_01_Berechnung_01; % bereitgestelltes Skript zu Auswertung INNERHALB der Hauptschleife end MechGL_Versuch_01_Berechnung_02; % zusätzliches Skript zu Auswertung NACH der Hauptschleife
Das Rahmenprogramm ist dabei so aufgebaut, dass hier auch eine automatische Dokumentation im .html-Format mit der Funktion publish() erfolgen kann. Bitte beachten sie hier die in der Vorlesung/Übung erläuterte Vorgehensweise. Weitere Hinweise finden sie auf den Hilfeseiten zur Funktion:
https://de.mathworks.com/help/matlab/ref/publish.html
https://de.mathworks.com/help/matlab/matlab_prog/marking-up-matlab-comments-for-publishing.html
Aufgaben
Ermittlung folgender Daten aus den teilaufbereiteten Daten:
1. Vorbeifahrgeschwindigkeit - v_pass(1:anz_f)
2. Abstand Vorbeifahrt - y_pass(1:anz_f)
3. Entfernung zur Parklücke - x_start(1:anz_f)
4. Einparkdauer - t_park(1:anz_f)
5. Breite der Parklücke - b_park(1:anz_f)
6. Abweichung Mittelposition - d_cent(1:anz_f)
Für die Bewertung sind mindestens die Punkte 1, 3 und 6 einzubeziehen. Alle anderen werte können, müssen aber nicht genutzt werden.
Beschreibung und Darstellung der Ergebnisse
In der Auswertung muss eine kurze Beschreibung des Versuchsablaufs sowie der Vorgehensweise enthalten sein. Die Einbindung externer Quellen (Internet) ist hierbei ausdrücklich erwünscht. Die Ergebnisse sind in geeigneter grafischer Form und mit einer kurzen inhaltlichen Beschreibung darzustellen. Die als am besten und am schlechtesten ermittelten Fahrten sind eindeutig zu kennzeichnen (z.B. durch eine andere Farbe). Für ein Balkendiagramm kann dies in folgender Art realisiert werden:
bar_v_pass = bar(v_pass*3.6); grid on; bar_v_pass.FaceColor = 'flat'; bar_v_pass.CData(2,:) = [1 0 0]; % Farbe rot im RGB-Format für Balken 2
Die beiden ersten Grafiken zeigen die Messdaten mit eingezeichneten Referenzwerten oder wichtigen Berechnungsergebnissen.
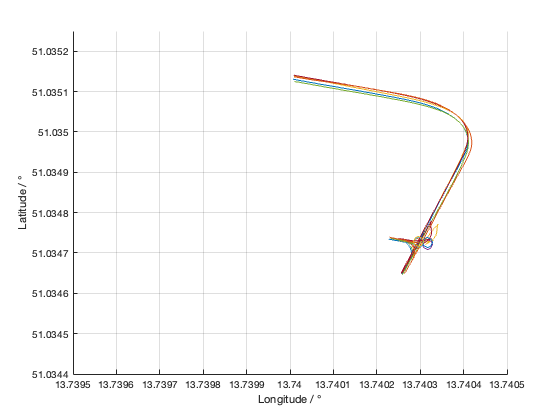
Bild 1: GPS-Koordinaten der ausgewerteten Messfahrten mit eingezeichneten Referenzpunkten
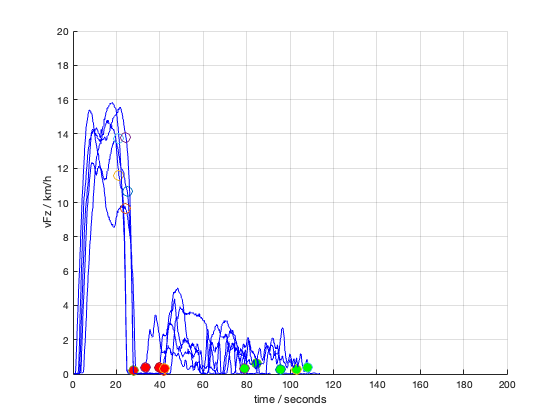
Bild 2: Verlauf der Fahrzeuggeschwindigkeit mit eingezeichneten Start- und Endwerten zur Ermittlung der Einparkdauer
Die beiden nachfolgenden Grafiken zeigen die Ergebnisse für die Bewertung bei der gleichwertigen Einbeziehung von v_pass und t_park. Die beste Messung ist mit grün markiert, die schlechteste mit rot. Bitte beachten sie, dass je nach Auswertung bei ihnen andere Messfahrten ausgewählt sein können.
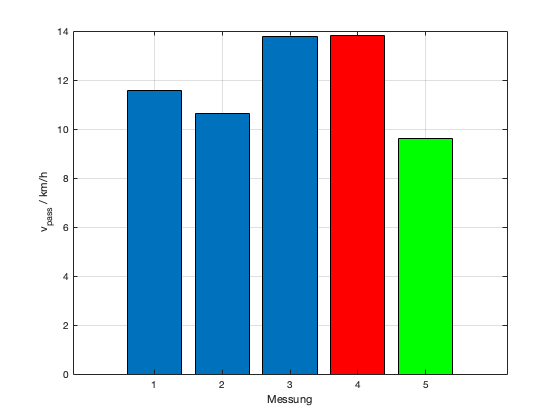
Bild 3: Vergleich der Vorbeifahrgeschwindigkeiten und Kennzeichnung der besten Fahrt.
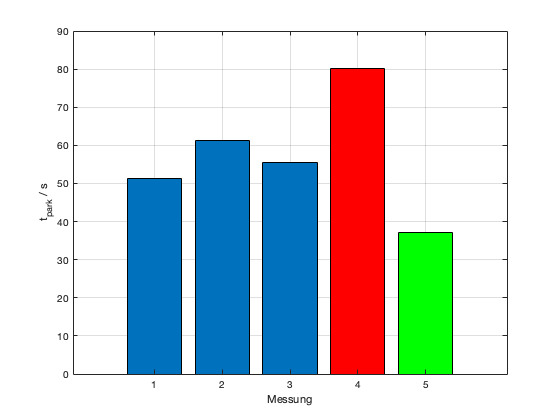
Bild 4: Vergleich der Einparkzeiten und Kennzeichnung der besten Fahrt.
Abgabe
Die Abgabe erfolgt wieder als gepackte .zip-Datei mit allen Daten, Skripten und dem html-Verzeichnis der automatischen Dokumentation in der vorgegebenen Verzeichnisstruktur bis zum 13.01.2025 um 9:00 Uhr. Der Upload-Link wird im OPAL-Bereich der Lehrveranstaltung veröffentlicht. Die Bekanntgabe erfolgt in den Lehrveranstaltungen und per Rundmail.