MechGL 2024 - Versuch 1
Inhalt: Auswertung assistiertes Einparken
HTW-Dresden Fakultät Maschinenbau Professur Kraftfahrzeug-Mechatronik Vorlesung Mechatronische Grundlagen (MechGL)
Contents
Versuchsbeschreibung
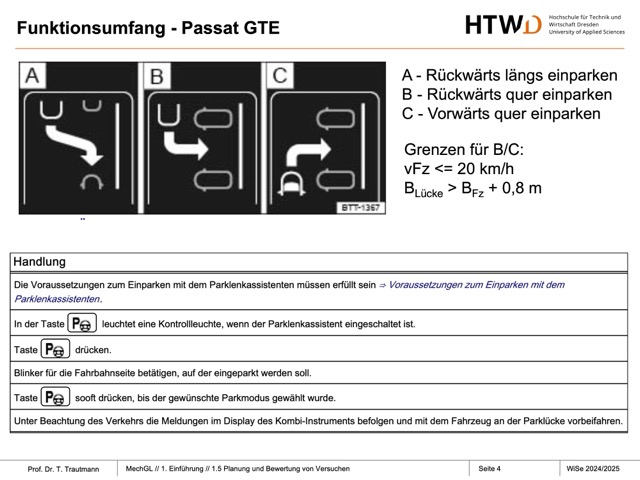
Ein Passat GTE führt unter verschiedenen Randbedingungen ein assistiertes Einparkmanöver in eine Querparklücke durch. Die Geschwindigkeit wird dabei sowohl über den Fahrzeug-CAN als auch über ein zusätzliches GPS-Modul erfasst. In den Versuchen wurden die folgenden Parameter variiert:
- Geschwindigkeit der Vorbeifahrt
- Abstand bei der Vorbeifahrt
- Breite der Parklücke
Je nach Rahmenbedingung mussten mehrere Züge zur Erreichung der finalen Parkposition erfolgen. Sowohl in der Position vor Start des Einparkmanövers als auch nach dessen Ende erfolgte eine Messung mit einem Lidar zur Ermittlung der folgenden Werte:
- Abstand bei der Vorbeifahrt (Lidarmessung 1)
- Ausrichtung in der Parklücke (Lidarmessung 2)
Die Funktionsweise und Bedienung des Systems ist in der nachfolgenden Grafik dargestellt. Im Versuch werden hierzu weitere Hinweise gegeben.
Im folgenden Video ist eine Versuchsdurchführung als Beispiel zu sehen: https://youtu.be/pNRMVZeC0MA
Hinweise zur Protokollierung
Die Auswertung des Versuchs ist Teil der APL. Bitte notieren sie sich eigenständig alle für die Auswertung relevanten Informationen. Herr Engert gibt ihnen gerne weitere Auskünfte. Sollten sie eigene Bilder/Videos der Durchführung erstellen wollen, sprechen sie dies bitte mit ihm ab.
Darstellung der Ergebnisse
Die nachfolgenden Grafiken zeigen die Ergebnisse der Berechnungen.
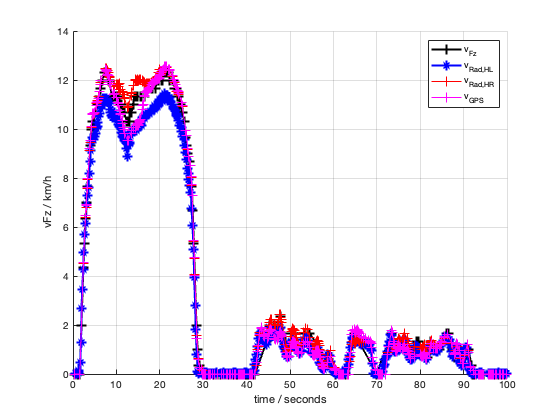
Bild 1: Darstellung des Verlaufs der Geschwindigkeiten für unterschiedliche Sensoren.
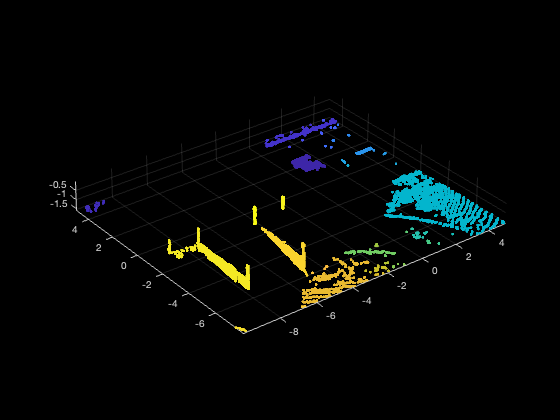
Bild 2: Punktwolke der 1. Lidarmessung (Ausschnitt)