MechGL 2023 - Versuch 03
Inhalt: Optimierung von Parametern im Fahrversuch
HTW-Dresden Fakultät Maschinenbau Professur Kraftfahrzeug-Mechatronik Vorlesung Mechatronische Grundlagen (MechGL)
Contents
1. Einleitung
Die Applikation von Steuerungs- und Regelungsparametern ist ein wichtiger Bestandteil der Fahrzeugentwicklung. Dieser Prozess ist üblicherweise sehr zeitaufwändig und kostenintensiv. Es wird daher zunehmend versucht, Simulationen als Ersatz für Realversuche einzusetzen. Ziel dieses Versuches ist, den Aufwand von Realversuchen zu erkennen und eine Parameteroptimierung einer Fahrfunktion effektiv durchzuführen. Dazu soll ein automatischer Stopp nach zwei gefahrenen Runden bei 3 verschiedenen Geschwindigkeiten erfolgen. Je nach Geschwindigkeit muss der Stopp-Befehl bei unterschiedlichen Winkeln ausgegeben werden. Hierzu ist eine einfache Steuerungslogik zu entwickeln, die bei allen Geschwindigkeiten funktionieren muss.
2. Versuchsdurchführung
2.1 Vorbereitung der Funktion
Die Steuerungsfunktion ist im Simulink-Block "Steuerungsfunktion" als Matlab-Skript zu erstellen. Eingangsgrößen sind die Fahrzeuggeschwindigkeit v_Fz und der Gierwinkel. Das Grundmodell Tempomat_07_Offline_23a.slx steht im Opal im Ordner des Praktikumsversuchs 3 zum Download bereit.
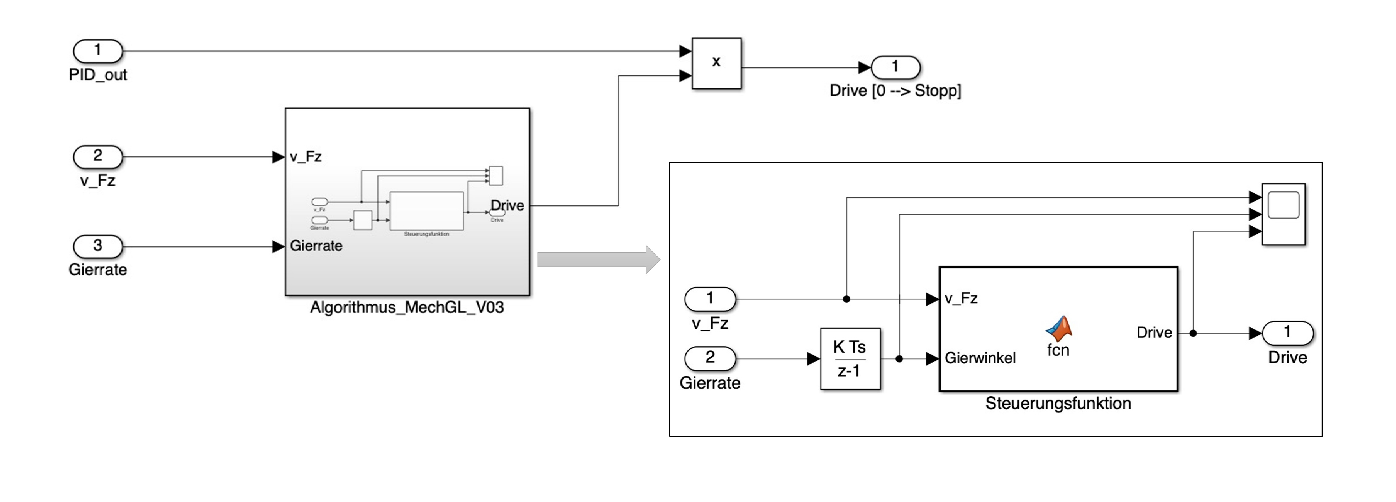
Abbildung 1: Simulink-Modell (Offline-Version)
Der Programmcode muss innerhalb des markierten Bereichs eingefügt werden. Das Fahrzeug stoppt automatisch, wenn die Variable Drive auf den Wert 0 gesetzt wird. Die bereits vorhandene Verzweigungsanweisung dient der sicheren Funktion während der Beschleunigungsphase. Es ist zu beachten, dass das Fahrzeug nach Absetzen des Stopp-Signals nicht wieder anfährt. Das ist notwendig, um den Aufwand für die Steuerungsfunktion möglichst gering zu halten.
Rahmenfunktion:
function Drive = fcn(v_Fz, Gierwinkel)
Drive = 1;
if (Gierwinkel > 180) %___ Beginn Code ___
%___ Ende Code ___ end
2.2 Durchführung des Versuches
Der Funktionsblock wird von Herrn Engert in das Echtzeit-Modell im Fahrzeug eingebunden. Danach können sie durch systematische Anpassung der drei Stopp-Winkel die beste Stopp-Position ermitteln. Für das finale Parameterset erfolgt ein abschließender Versuch bei allen drei Geschwindigkeiten. Die Abweichungen zur Startposition sind dabei manuell zu vermessen und im Modell in einem Textblock abzulegen. Das Modell wird dann unter dem Gruppennamen gespeichert.